
You’re ready to fly, the weather is nice, the birds are chirping, and you get that fluttery feeling in your stomach as your drone powers up. As you increase the throttle the drone lifts off and suddenly flips over and crashes. What the heck…

There are several reasons why this is occurring and each reason has a simple explanation and easy fix. The most common cause for a drone instantly flipping over upon take-off is because of a miscommunication issue between the motors and the flight controller.
How does the miscommunication error happen?
- Firstly, a quick crash course on flight controllers. Flight controllers take the input from the pilot and send it to the motors. Part of the flight controller software is called PID. PID stands for Proportional, Integral, Derivative. It takes the data from the drone’s sensors and calculates how fast the motors should be spinning in order to obtain the correct speed. It does this by referencing the measured values, coming from a gyro sensor, up against the desired values, set by the pilot. It then takes the difference as an error and takes corrective action. This measurement/referencing loop happens constantly. Some racing drones PID loop thousands of times a second. This loop can be tuned and is referred to as PID Tuning. Back to fixing the flip…
- Now if the motors are not doing what the flight controller software PID tells them to do it can cause major problems. If it communicates to the front right motor to speed up and the opposite occurs, the PID will try to compensate for the “error” and correct even more. This causes a feedback loop that snowballs to the point where one motor is on full and the opposite is off and the drone flips. This can happen in a split second.
- The flipping can also occur because the motor is spinning in the opposite direction. Two of the motors opposite from each other should be spinning CW and the other two, opposite from each other, CCW.
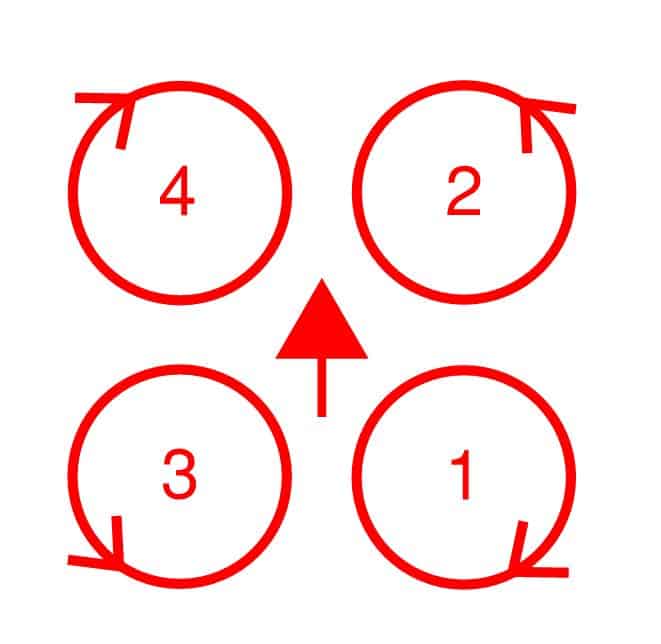
- Another likely reason is the orientation of the flight controller. Flight controllers can’t be installed in any direction. Most flight controllers have an arrow on them indicating their intended orientation/direction. The diagram below (Fig A) is part of the solution to the last three problems mentioned. 90% of the time your drone is flipping because your drone does not match this diagram. It is the drone orientation guidebook in a picture. It shows how most flight controllers number the motors in relation to the direction they are installed. This is critical as it tells the PID which motor is a CW motor, which is a CCW motor and where they are located.
- Motor 1: Back right motor spins CW
- Motor 2: Front right motor spins CCW
- Motor 3: Back left motor spins CCW
- Motor 4 Front left motor spins CW
- Note: Most Flight controllers adhere to this orientation. In the rare case that this is not the case you can either check with the manufacturer or you can also verify the orientation with a GUI. Most flight controllers come with a GUI (Graphical User Interface) Software. See Figure B. This enables the user to see the orientation of the drone live. The user can tilt the frame forwards and verify that the 3D model in the GUI also pitches forwards. Betaflight is a GUI that can be downloaded here and works with the majority of flight controllers. For information on a GUI that will work with your flight controller contact the manufacturer. Of course, you can check which way the motors are spinning manually. You can do this by REMOVING THE PROPS and turning the drone on. Arm it and slowly push the throttle until the motors kick on and look at the direction they are spinning. (see fig A).
- Prop installation
- Usually, an instant flip is not an issue with propellers being installed wrong but it doesn’t hurt to check
- Make sure the CW Props are installed on the correct motors and the CCW Props installed on the correct motors.
- Usually, the topside of the prop has a glossier finish than the bottom side.
- Also, make sure the bolts securing the props are tight on each motor. A flip could occur if a prop is not tightened properly on one of the motors.
- Wiring Issues
- If the drone was not built/wired correctly it can cause lots of issues, including flipping.
- Wiring a motor backward can cause the motor to spin the wrong direction.
- Also, check the wiring diagram to ensure that the ESC signal wire is connected to correct FC output
- Motor Short
- Another possibility could be a motor screw being longer than expected and touching the motor windings. This basically creates an electrical short and can cause issues when powering it up.
- GUI Software Checks – NOTE: Some Flight Controllers need the battery plugged in to power up the receiver and be functional.
- Using a GUI such as Betaflight has many advantages. It allows the user to change the settings in the Flight Controller and see the 3D model as mentioned above. There are several settings that can cause an issue if they are not correct and result in a flip. Luckily settings are easy to fix in most cases
- Turtle Mode – Is a mode that allows the user to flip back over after a crash. It is normally set to a switch on the Transmitter that once flipped the user can rearm the drone and use the pitch or roll sticks to flip it back over. Check the settings on Betaflight to see if it has been left on/enabled. It is set in the Modes section of Betaflight. If the turtle mode is not set up properly it can cause issues. See if turning it off works before trying to tweak the settings.
- Receiver – The Receiver Tab on Betaflight should be checked to make sure the Throttle, Yaw, Pitch, and Roll bars are moving in the right direction. The values assigned to these channels generally range from 1000 – 2000. When the sticks are in middle they should be reading 1500. This is also important because if your trim is set improperly you will be taking off and already be starting to pull a certain direction. See Why does my drone drift and how to fix it here if that is more of your problem than an instant flip.
- As the throttle stick moves up throttle values increase – throttle stick down and the throttle values decrease
- As the yaw stick moves right yaw values increase – yaw stick moves left and the yaw values decrease
- As the pitch stick moves up pitch values increase – pitch stick moves down and the pitch values decrease
- As the roll stick moves right roll values increase – roll stick moves left and the roll values decrease
- Accelerometer
- Drones are often flown in either Self-level mode or Acro mode. In Self-level mode the drone will automatically level out the drone if no input is received from the pilot. This is a useful mode for beginners, but most FPV drone pilots fly in Acro mode which allows them to not have to fight against the FC and with smaller smoother inputs. The easiest way to check and see if the accelerometer needs to be recalibrated is to put the drone into Acro mode. This disables the Accelerometer. If the flipping issue is resolved by setting it into Acro mode you can narrow it down to the Accelerometer.
This post attempted to cover all of the most likely reasons why your quad is flipping. If you are still having trouble with flipping you can either contact the manufacturer or dig into the various drone forums for your particular build/model. I may do a video on this at some point but for now, if you need more information on this and would like to learn it visually check out Joshua Bardwell’s Youtube video here.